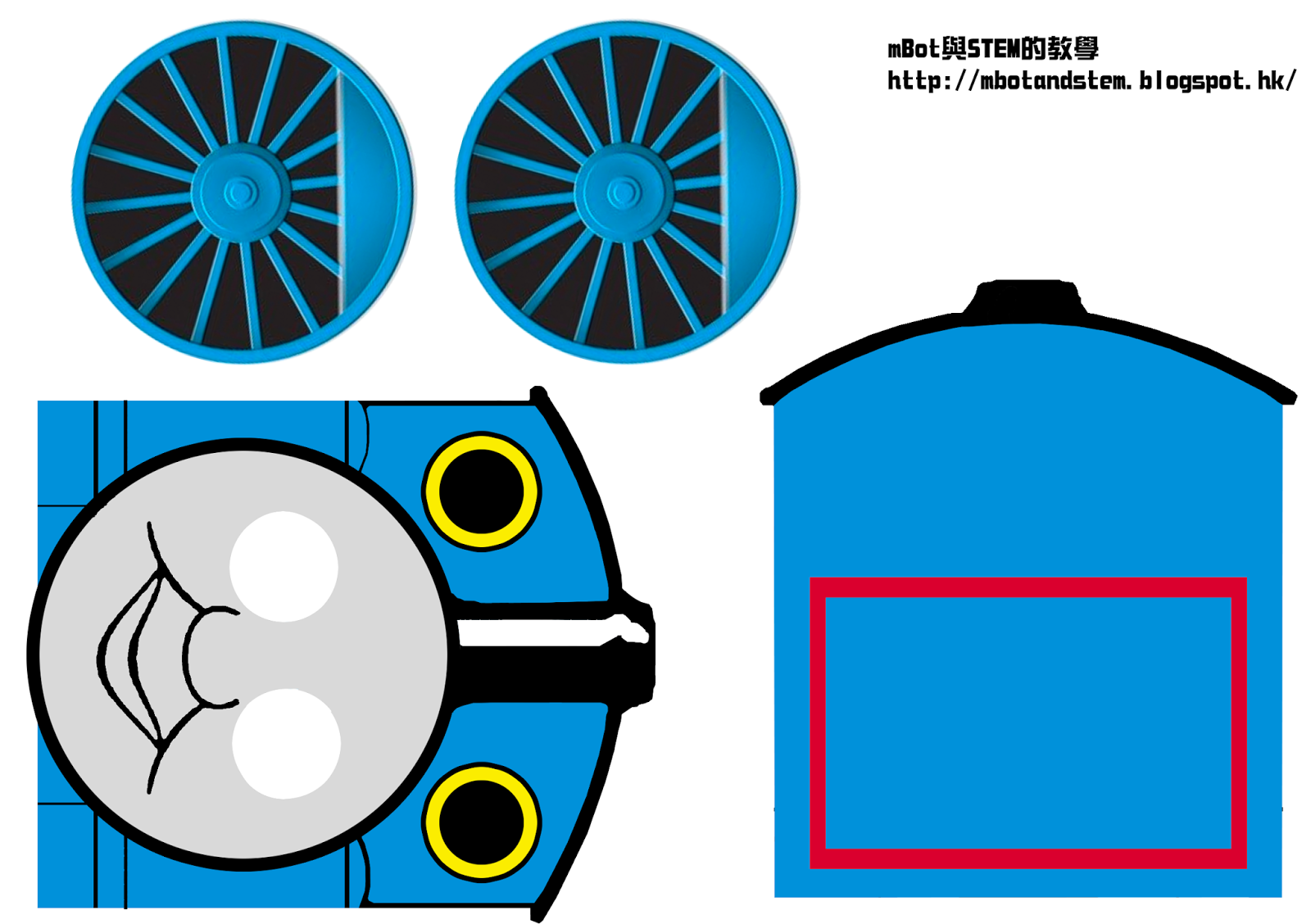
這裡我們將提供圖紙樣本下載(按下放大圖片,再右鍵另存目標),每張圖紙的尺寸是A5(148mm高 x 210mm闊),列印時要注意,切勿縮放列印,以免尺寸不合。
mBot 設計圖紙下載:

比卡超:

湯瑪士小火車:
復仇者聯盟:


| Sensor 1(左邊) | Sensor 2(右邊) | 回傳值 | 說明 | 圖示 |
|---|---|---|---|---|
| 黑色 | 黑色 | 0 | 完全處於黑線上 | 
|
| 黑色 | 白色 | 1 | 靠左是黑線 | 
|
| 白色 | 黑色 | 2 | 靠右是黑線 | 
|
| 白色 | 白色 | 3 | 完全處於白線上 | 
|
 |  |
 | ⇨ |  |  |
 | ⇨ |  |  |
 | ⇨ |  |  |

 | ⇨ |  | ⇨ |  |


 | 這個方法較為簡單,只需要利用超聲波感應器偵測到一定距離後,開始執行走半個正方形的路線,然後回到軌道上即可。但這個方法路程遠了,因而較為費時。 |
 | 這個方法則較為複雜,需要利用超聲波感應器偵測到一定距離後,先向外轉向,再設定左右兩個馬達以不同速度前進,從而讓 mBot 機械人順暢地走弧形,然後回到軌道上即可。這個方法需花時間反復測試,方可成功,但走的路程短了,因而較為省時。 |

| 序號 | 引腳 | 功能 |
| 1 | GND | 接地 |
| 2 | VCC | 接電源 |
| 3 | S1 | 感測器1資料輸出 |
| 4 | S2 | 感測器2資料輸出 |


| 函數 | 功能 |
| MeLineFollower(uint8_t port) | 定義連接埠 |
| uint8_t readSensors() | 讀取感測器狀態 |
#include "MeOrion.h" /* 本範例以Me Orion作主控板 */
#include <Wire.h>
#include <SoftwareSerial.h>
MeLineFollower lineFollower(PORT_6); /* 本範例中以連接埠6連接Me 巡線模組 */
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorState = lineFollower.readSensors(); /* 取得當時Me 巡線模組的回傅值 */
switch(sensorState) {
case S1_IN_S2_IN:
Serial.println(“Sensor 1 and 2 are inside of black line”);
break;
case S1_IN_S2_OUT:
Serial.println(“Sensor 2 is outside of black line”);
break;
case S1_OUT_S2_IN:
Serial.println(“Sensor 1 is outside of black line”);
break;
case S1_OUT_S2_OUT:
Serial.println(“Sensor 1 and 2 are outside of black line”);
break;
default:
break;
}
delay(200);
}

















|
|||||
| 取得清單中的所有元素 | 新增資料到清單中 | 將第N項的資料從清單中移除 | |||
| 將資料插入到清單中第N項的前面 | 將清單中第N項的資料換成新的值 | ||||
| 取得清單中第N項的資料 | 取得清單的長度 | 判斷清單中是否有包含該項資料 | |||